Autonomous Vehicle with Active Perception
Computer Vision • Hardware • Perception • Object Detection • Instance SegmentationProblem Statement
To reduce manual labor & impact of herbicides by prototyping an agricultural robot for detection & removal of weeds from crops.
Target Audience
Farmers
Overview
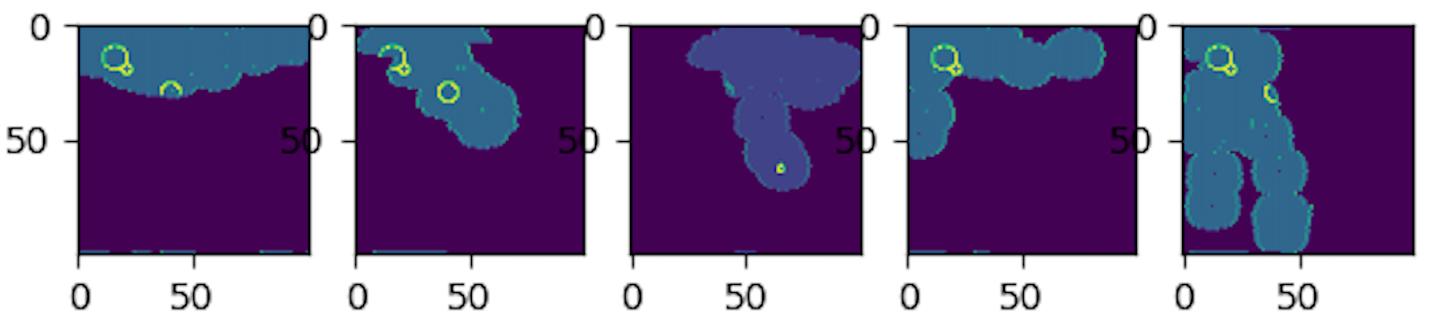
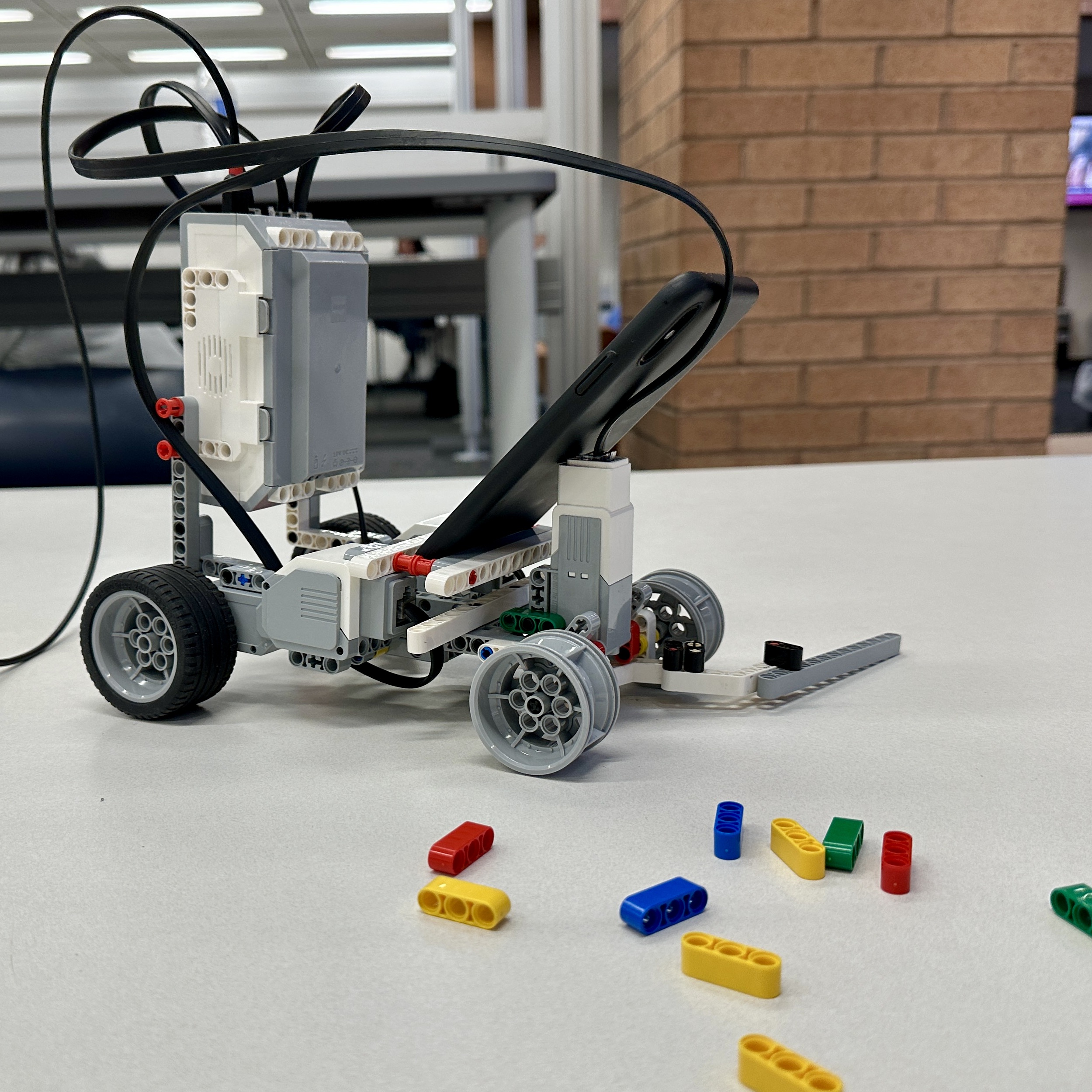
• Object Detection using YOLO (You Only Look Once) v5 model
• 550+ images for model training
• iPhone camera input utilized for processing on Macbook laptop*
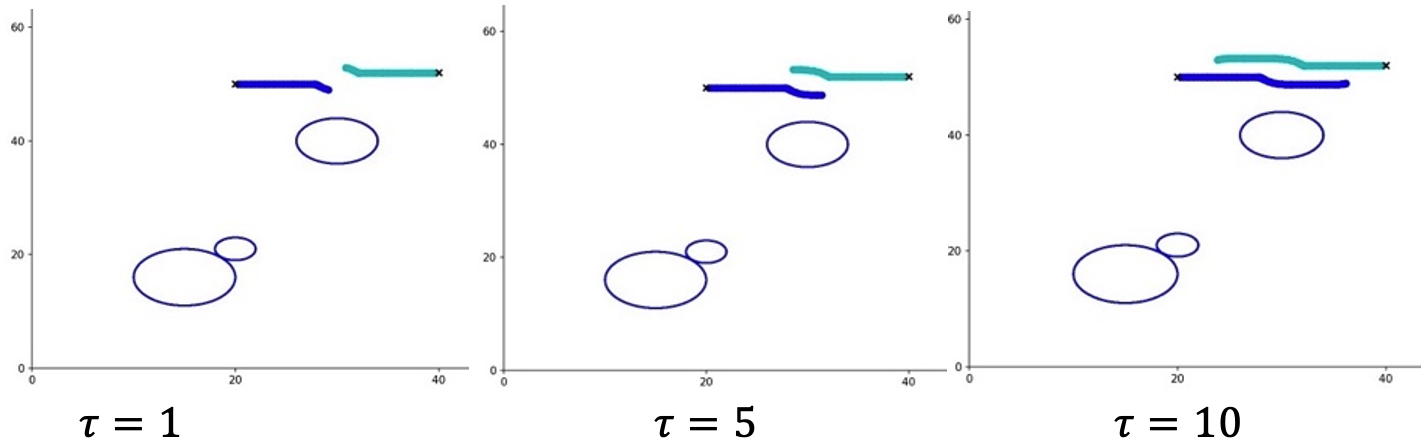
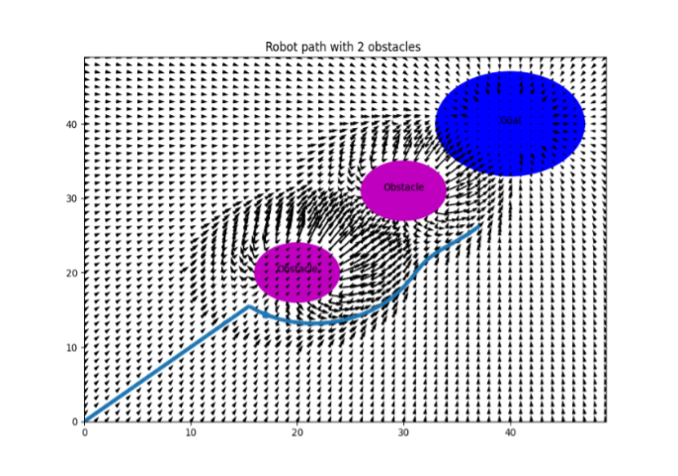
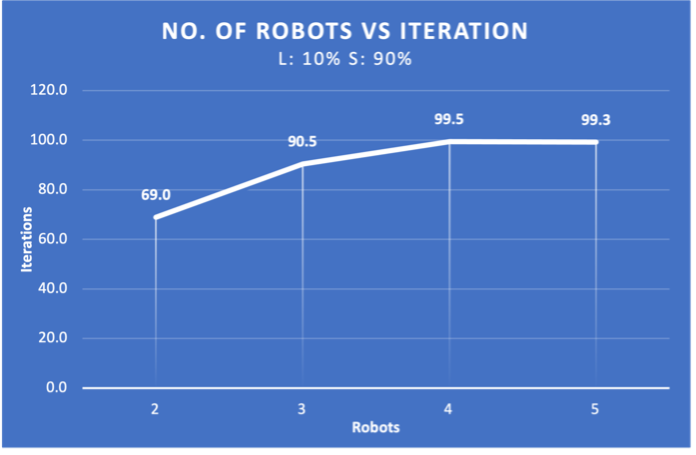
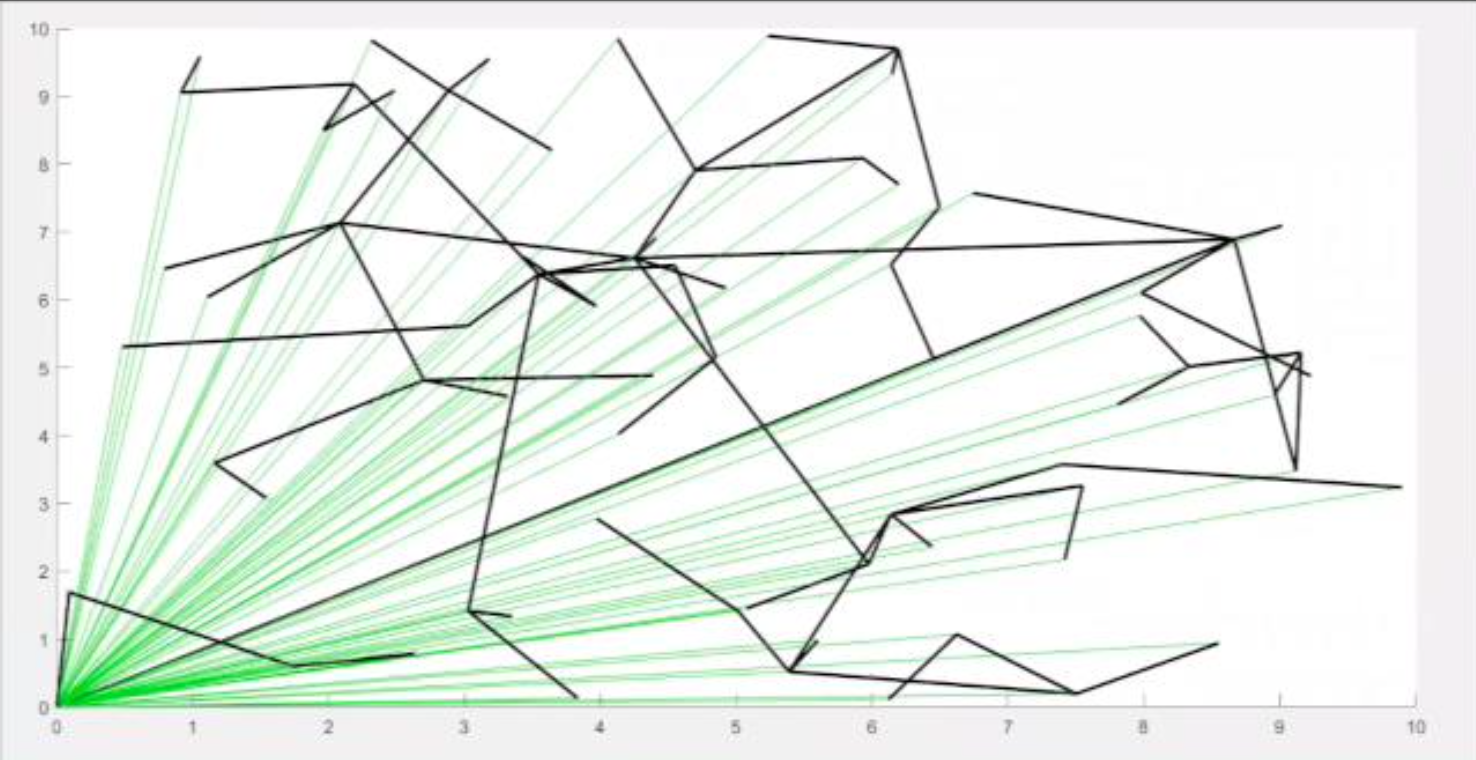
• Probabilistic exploration mode
• 95% weed removal accuracy
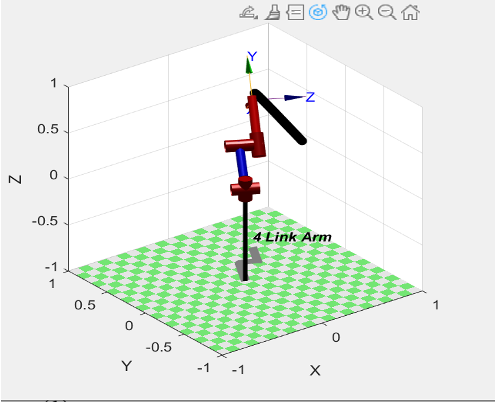
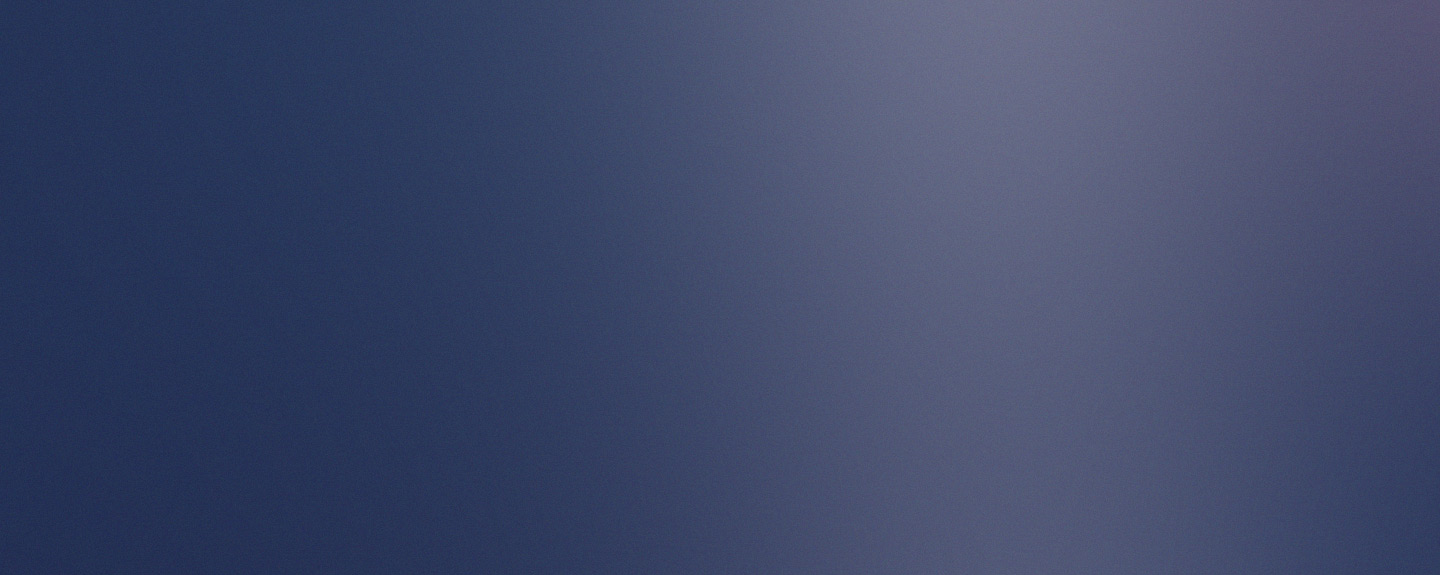
• Hardware implemented using LEGO Mindstorm EV3 kit
* MacOS and iOS based system essential for continuity camera feature by Apple
Tools & Frameworks
Python • PyTorch • OpenCV